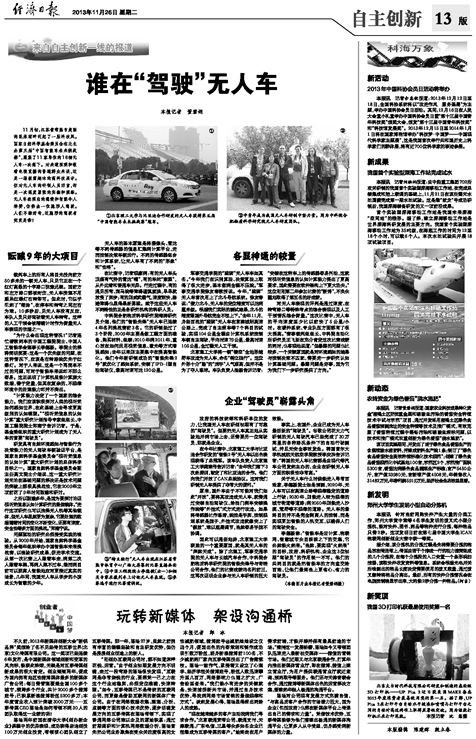
11月初,江苏省常熟市美丽的昆承湖畔刮起了一股科技风。国家自然科学基金委员会在此主办第五届“中国智能车未来挑战赛”,聚集了11家单位的18辆无人车一决高下。对夹道围观和收看电视直播的普通群众来说,这是一场极富趣味的高科技展示。但对无人车的研制人员而言,却是一次高度紧张的实验和演练。无人车表现出的稳健和智能令人称赞,仿佛由一位隐形人驾驶。人们不禁好奇,这隐形的驾驶者究竟是谁?
酝酿9年的大项目
裁判车上的所有人将目光投向前方50多米的一辆无人车,只见它正在一个红灯高悬的十字路口犹豫迟疑。因前方和左方路口都被封住,无人车按理不用顾忌红绿灯右转即可。但此时,它似乎犯起了“糊涂”,在停车和转弯之间左右为难。10多秒后,见无人车没有反应,车队人员只好驾驶着无人车转弯。这样的人工干预会被精确计时作为衡量无人车表现的依据之一。
“为什么会出现这种情况?”记者连忙请教同车的中国工程院院士、中国人工智能学会理事长李德毅。李院士的解释简明扼要:这是一个优先级的问题,在这种情况下,应该是右转路线优先于红绿灯。对于人来说,这是一个再简单不过的问题,可对于智能车来说却不那么容易。这正说明了计算机虽能计算庞大数据,善于定量,但其在复杂的、不规律环境中的处理能力却并不突出。
“计算能力决定了一个国家的综合能力。我们应该积极探讨人类的视听觉如何感知世界,在此基础上去寻求更高级别的认知模型。”“视听觉信息的认知计算”重大研究计划指导专家组组长、中国工程院院士郑南宁告诉记者。于是,基金委组织的重大研究计划成为了无人车的首要“驾驶员”。
研发具有自然环境感知与智能行为决策能力的无人驾驶车辆验证平台,是国家自然科学基金委员会“视听觉信息的认知计算”重大研究计划的总体科学目标之一。国家自然科学基金委员会副主任高文院士介绍说,这一重大研究计划无论在基础问题的解决还是技术问题的突破上都极具挑战性,它在2009年立项前花了9年时间酝酿和研讨。
之所以酝酿多年,是因为要探讨论证视听觉信息认知计算研究的最佳载体。“进行这项研究也可以选择无人机等其他载体,但无人车显然更为复杂,它要处理的数据随着时间的变化不断变化,还要有速度、安全性等多方面的挑战。”郑南宁说。
问题驱动的研究必须接受实践的检验。从2009年开始,国家自然科学基金委员会每年组织举办中国智能车未来挑战赛,以检验研究成果,促进学术交流。从第一次比赛上人跟着车走,到第二次人跟着车跑,再到人跑不过车,继而到目前可以脱离人智能地应对更接近真实的场景,几年间,我国无人车从学步的小孩成长为智慧的少年。
各显神通的较量
无人车的基本原理是将摄像头、雷达等不同传感器的信息汇集到计算平台,进而控制决策车辆运行。不同的传感器组合和计算系统,让无人车有了不同的“形象”和“性格”。
在比赛中,记者观察到:有的无人车头顶颇有气势的雷达“帽”,有的车纯“素颜”,从外边看和普通车无异。行进过程中,有的遇见拐弯、斑马线等障碍谨慎腼腆,早早就放慢了脚步;有的则威武霸气,速度既快,躲避障碍也显得果断勇猛。赋予这些无人车不同特性的正是各研究机构的科研人员。
中科院合肥物质科学研究院梅涛研究员介绍,他们的“智能先锋”无人车已连续4年名列挑战赛前3名。它的研制经过了3个阶段,2009年主要是做工程方面的准备,购买材料、组装;2010年到2011年,重心放在如何运用视觉信息、激光等方式增强感知;去年以来则主要集中在提高智能化。他们今年新研制成功的“智能先锋2号”就优化了感知系统,安装了IPD-I型自动驾驶仪,最高时速可达120公里。
军事交通学院的“猛狮”无人车车如其名。“今年我们在识别算法、决策算法上取得了很大进步,基本做到全程不压线。”军事交通学院徐友春教授说。今年,“猛狮”无人车首次用上了北斗导航系统。徐友春说:“借力北斗,无人车的定位精度可以达到厘米级。根据我们实际的测试结果,北斗的精度跟国外导航完全不相上下。”去年11月,身经百战的“猛狮”无人车在京津城际高速公路上,完成了自主超车等7个科目的试验,实现104公里全程由计算机系统控制车辆自主驾驶,平均时速79公里,最高时速105公里,全过程无人工干预。
北京理工大学将一辆“镂空”全地形越野车改造为无人车,命名“特立独行”。这位外形十分“酷”的“选手”人气颇高,但并不是为了夺人眼球。车队负责人杨毅告诉记者:“安装在这种车上的传感器容易抖动,这就对视听觉信息的认知计算能力提出了更高要求,因此需要在软件架构上下更大功夫。”这位刚刚第二年参加比赛的“新秀”,不负众望地取得了第五名的好成绩。
对无人车表现的评判是通过速度、在转弯路口等特殊考点的综合表现以及人工干预情况综合衡量。“这次比赛中,无人车的平均速度至少比以前快了5公里/小时。在硬件系统、专业队伍方面都有了很大提高。”赛事裁判组组长、中科院自动化所研究员王飞跃在充分肯定这次比赛成绩的同时,也客观地说道:“但暴露的问题也比较多,一个关键原因就是对环境感知的结果与控制决策不匹配,需要进一步研究认知计算基础问题。暴露问题是好事,因为它为我们下一步研究提供了方向。”
企业“驾驶员”崭露头角
政府的科技统筹和科研单位的发力,让我国无人车在研创初期有了可靠的“驾驶员”。但要把无人车真正地从实验地开到市场上去,还需要另一位驾驶员,那就是企业。
在今年比赛中,北京理工大学与比亚迪合作研发的“智能2号”无人车以出色表现获得了总冠军。该车队负责人北京理工大学龚建伟告诉记者:“去年我们南下3次赴深圳,敲定了和比亚迪的合作。他们向我们开放了CAN总线协议。这对我们研制无人车提供了非常大的便利。”
原来,国外车由于不可能对我们如此“开放”,要将其改造成无人车,就需通过安装自动驾驶仪、给油门刹车安装操作线等“外挂式”式方式进行改造。如果将传感器比作眼睛,线控是手脚,控制规划系统是脑子,外挂式改造就像安上了“假肢”,难以底层调节,当然容易手脑不协调。
因此可以通俗地讲,北京理工大学获胜的一个重要原因,就是其无人车的“浑然天成”。除了北理工,军事交通学院的无人车与长城汽车合作,中科院合肥物质科学研究院的智能先锋号与奇瑞公司合作,他们的比赛成绩均名列前三,这再次证明企业参与无人车研制的巨大效能。
事实上,在国外,企业已成为无人车最活跃的“驾驶员”。谷歌公司花大力气研制的无人驾驶汽车已经完成了30万英里的各种路况条件下的自动行驶测试,并且无安全事故发生。韩国首尔大学机械航天航空学院教授李庆洙告诉记者:“韩国的无人车比赛都是由现代等汽车公司发起主办的,企业在研制无人车方面的积极性非常高。”
关于无人车什么时候能进入寻常百姓家,李德毅院士如是预测,2020年,无人车可以在高速公路等规律稳定的道路上行驶;2030年,则能进入较为规律的城市街道等道路;到2050年则能进入沙漠、荒野等不规律的道路。无人车的最终目的并不是完全剥离人的控制,而是实现更加智能的人机交互,以确保人们的驾驶安全。
李德毅称:“智能车是云计算、物联网、智慧城市众目睽睽之下的交集,它必然能火起来。”当然,要实现“火起来”的目标,政府、科研机构、企业这3位初期“驾驶员”的作用缺一不可。他们的共同目的就是把智能车的方向盘交给百姓,让他们最终当上更省心、省力的驾驶员。
(本稿图片由本报记者董碧娟摄)